In the era of ubiquitous multirotor drones, the choice of an aircraft platform, may seen unusual but it was dictated by other requirements in which the aircraft perform much better. The biggest advantage of the aircraft in comparsion with multirotor drones is its operational capacity. The airplane is able to carry a relatively large load at a distance of about tens of kilometers even in relatively difficult atmospheric conditions. In addition, the economic speed of the aircraft is higher than a multirotor drone. As a platform for the construction of a unmanned aerial vehicle, we used a model kit of an aircraft designed for amateur FPV (First Person View) aircraft. The model is designed for high capacity, with push propeller system to eliminate “Rolling shutter” effect of digital cameras, which results in drawing excess horizontal lines in places of fast moving objects, such as an aircraft propeller or a helicopter rotor. This effect is unpleasant to the eye and makes it difficult to interpret the image autimatically. The airplane is controlled by a multi-function control radio operating in the 2.4 GHz band, with a theoretical range of up to 4 kilometers. Video transmission is performed in an analogical way, using a 5.8 GHz band, with theoretical coverage of two kilometers, allowing real-time viewing of images from one of three cameras mounted on a plane. Selection of a camera is done by the pilot-operator from the ground using the control radio. One basic camera is stationary, in the front of the aircraft and serves for piloting and orientation in the field. The other two cameras (including one thermovision) are located in a rotary head mounted under the fuselage and allow for observation in any direction relative to the flight of the aircraft. Table shows the basic technical characteristics of the platform used.
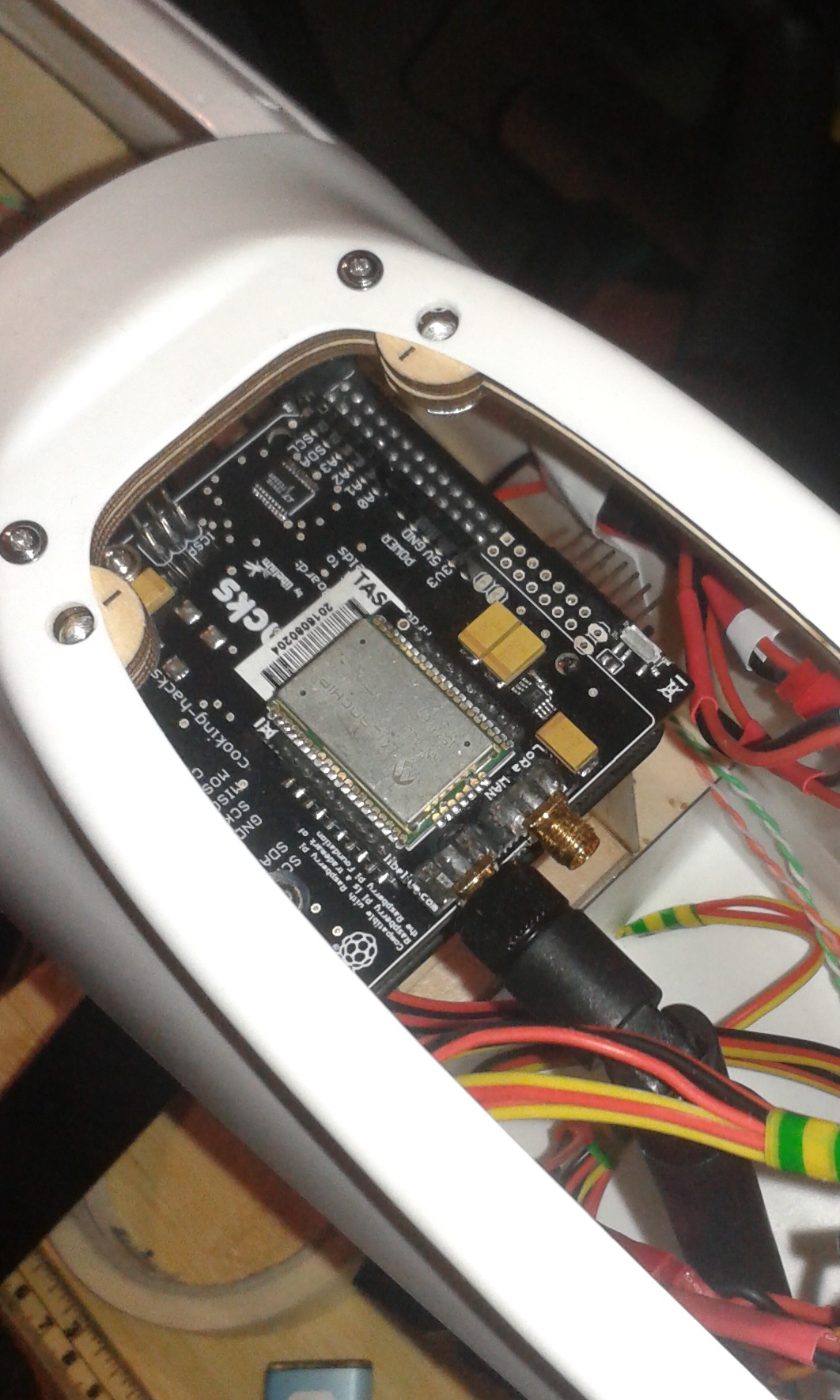
A RaspberryPi Zero miniature computer with a clock speed of 1 GHz and 512 MB of memory was installed on the airplane. The LoRaWAN transmission module was connected to the on-board computer. The aircraft was equipped with pressure and temperature sensors, a gyroscope, a magnetometer, an atmospheric speedometer, current sensors and a GPS receiver. Its software analyzes all the parameters read from the sensors by monitoring the parameters of the flight. In addition, data at specific time intervals, together with their corresponding GPS coordinates, are transmitted through LoRaWAN to the ground where it is possible to view and analyze them further. The airplane is also equipped to install additional sensors that could measure other environmental parameters, such as air quality, humidity and transparency. The architecture of the operating system also provides the possibility of imaging of the thermal imaging camera, for example, by searching for specific objects in its field of view.
| power unit | electric tree-phase 625W motor |
| power supply | lithium-polymer battery 14.7V 5Ah (main) lithium-polymer battery 11.1V 850mAh (axilary) |
| onboard voltage | 5 V |
| wingspan | 1980 mm |
| fuselage witdh | 1170 mm |
| maximum tak-off weight | 3700 g |
| time of flight | 2 h |
| cruise speed | 50 km/h |
| maksimum speed | 100 km/h |